Using an empirical and agent-based simulation model to quantify probabilities of fish and tidal turbine encounters and collisions
Jezella Peraza
Summary
Tidal energy is at an earlier stage of development and deployment due to potential animal-turbine interactions. Baseline and post-installation environmental monitoring data on animal-turbine interactions are not available. Inadequate data results in uncertainty among regulators who are cautious in consenting and permitting development of full-scale Marine Renewable Energy sites. Encounter and collision rates between aquatic animals and tidal turbines are not well quantified due to limited opportunities and appropriate technologies to observe, measure, and characterize interactions. This research is interested in developing conditional probabilistic empirical and agent-based models that quantify encounters and impacts between Pacific herring (Clupea pallasii) and axial and cross-flow tidal turbines in Admiralty Inlet, Puget Sound, WA.
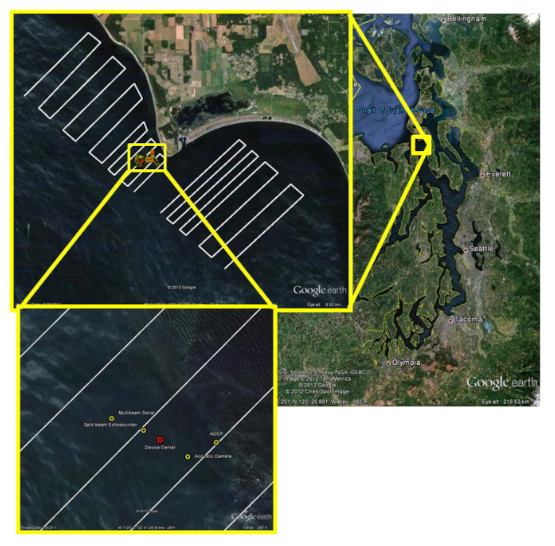
Acoustic data used in this research were collected in 2011 at a site in Admiralty Inlet chosen by the Snohomish Public Utility District for the potential deployment of two hydrokinetic turbines. Data were collected using a Simrad EK-60 echosounder operating at 120 kHz, an autonomous bottom-deployed 1MHz Nortek AWAC acoustic doppler current profiler (ADCP), and midwater trawl catches deployed from a mobile surface vessel. Acoustic and fish surveys were conducted during day and night for a combined total transect length of 28 km, where 324 parallel transects extending northwest and southeast of the proposed turbine location, were spaced 0.5 km apart. The ADCP collected concurrent tide state and tidal velocity measurements for 12 minutes every two hours. A Marinovich midwater trawl was used to capture samples to quantify species composition and length-frequencies of the fish community. Among captured species, Pacific herring represented 32% of the total catch by number. Therefore, all acoustic backscatter was attributed to Pacific herring in acoustic density calculations.
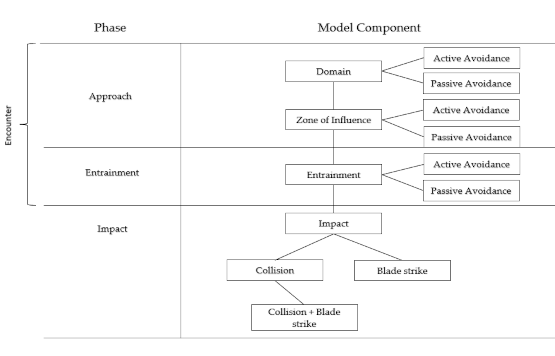
The encounter-impact model estimates probabilities of approach, encounter, collision, blade strike, and collision and blade strike using acoustic data from Admiralty Inlet and literature values when empirical data are lacking. The encounter-impact model is categorized into three phases, 1) approach, 2) entrainment, and 3) impact. The approach phase of the model considers when fish are within the domain of a tidal turbine and whether individuals are in the zone of influence, approximately 140 meters from the device. The entrainment phase of the model considers when fish are at a distance the same length and width as a turbine from the device, where both approach and entrainment resemble an encounter. The impact phase consists of collisions and/or blade strikes. Each component of the encounter-impact model includes active and passive avoidance probabilities, where fish can actively or passively evade model components or tidal turbines in their trajectories.
The conditional empirical model used fish positions from the Admiralty Inlet dataset to obtain probabilities of occurrence for each model component and published literature values for potential impacts. The agent-based model used the same structure as the encounter-impact model and species of interest, yet analyzed fish trajectories to a tidal turbine and incorporated behavioral rules to model fish approach and avoidance from a turbine. Despite both models being developed to analyze interactions in Admiralty Inlet, the encounter-impact model is designed to be generic and can be applied to any prospective tidal energy project site.
Presentations
15th European Wave and Tidal Energy Conference, Bilbao, Spain, 2023
University Marine Energy Research Community Conference, Durham, New Hampshire, 2023
Society for Advancement of Chicanos/Hispanics & Native Americans in Science: National Diversity in STEM Conference, Portland, Oregon, 2023
Publications
Peraza JI and Horne JK. Quantifying conditional probabilities of fish-turbine encounters and imapcts. Front Mar Sci. 2023;10:1270428. doi: 10.3389/fmars.2023.1270428